👨🎓 About Me
I am a third-year Ph.D. student in the School of Vehicle and Mobility at Tsinghua University, working under the supervision of Prof. Sifa Zheng.
My research centers on traffic simulation and motion planning for autonomous driving, with a particular emphasis on creating realistic, interactive, and controllable traffic scenarios. I am passionate about developing reliable closed-loop simulation frameworks to accelerate the safe, robust, and scalable advancement of autonomous driving systems.
🎓 Educations


🔥 News
📝 Publications
🔆 Select Publications
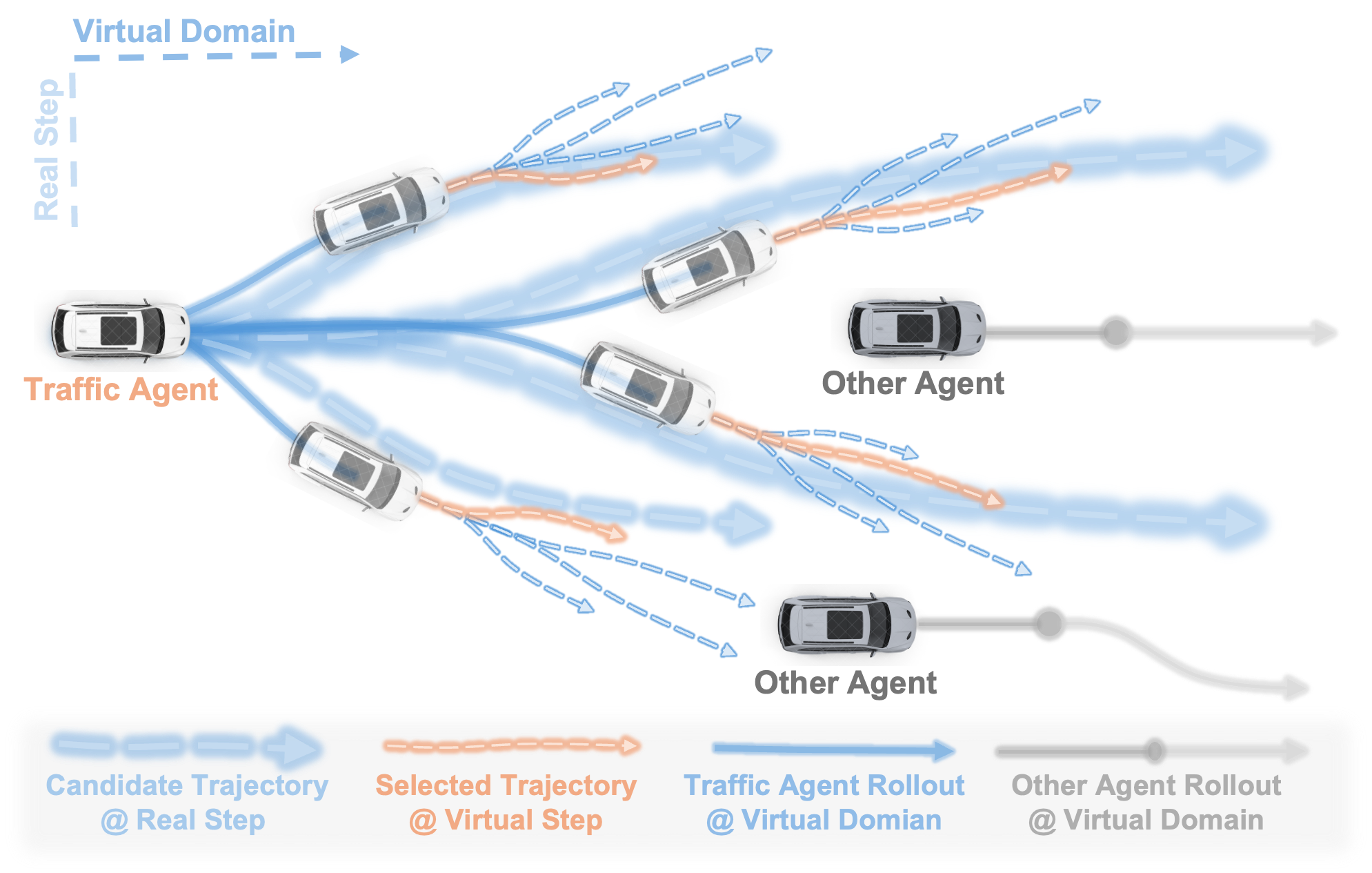
ForSim: Stepwise Forward Simulation for Traffic Policy Fine-Tuning
Keyu Chen, Wenchao Sun, Hao Cheng, Zheng Fu, Sifa Zheng
ICRA 2026
ForSim achieves high-fidelity traffic simulation by combining stepwise closed-loop trajectory propagation with physical dynamics for multimodal diversity and interaction-aware agent updates for realistic behavioral consistency.
RIFT: Group-Relative RL Fine-Tuning for Realistic and Controllable Traffic Simulation
Keyu Chen, Wenchao Sun, Hao Cheng, Sifa Zheng
arXiv 2025

RIFT achieve realistic and controllable traffic simulation by combining IL pre-training in a data-driven simulator for realism with RL fine-tuning in a physics-based simulator for controllability.
FREA: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality
Keyu Chen, Yuheng Lei, Hao Cheng, Haoran Wu, Wenchao Sun, Sifa Zheng
Conference on Robot Learning (CoRL Oral 4.3%), 2024

FREA incorporates feasibility as guidance to generate adversarial yet AV-feasible, safety-critical scenarios for autonomous driving.

IGT: Illumination-guided RGB-T object detection with transformers
Keyu Chen, Jinqiang Liu, Han Zhang
Knowledge-Based Systems (KBS) (SCI Q1, IF=7.4), 2023
IGT uses illumination intensity to guide the fusion process of multi-modality features, enabling the comprehensive utilization of cross-modality complementary information in object detection.
📚 All Publications
-
DriveCamSim: Generalizable Camera Simulation via Explicit Camera Modeling for Autonomous Driving. Wenchao Sun, Xuewu Lin, Keyu Chen, Zixiang Pei, Yining Shi, Chuang Zhang, Sifa Zheng. arXiv (2025)
-
Emergency Index (EI): A two-dimensional surrogate safety measure considering vehicles’ interaction depth. Hao Cheng, Yanbo Jiang, Hailun Zhang, Keyu Chen, Heye Huang, Shaobing Xu, Jianqiang Wang, Sifa Zheng. Transportation Research Part C: Emerging Technologies (2025)
🚀 Project
Highway-Adversarial

We manipulate critical background vehicles in the Highway-Env to exhibit adversarial behaviors that challenge the ego vehicle, creating safety-critical scenarios.
🧑💻 Internships

